選擇方法
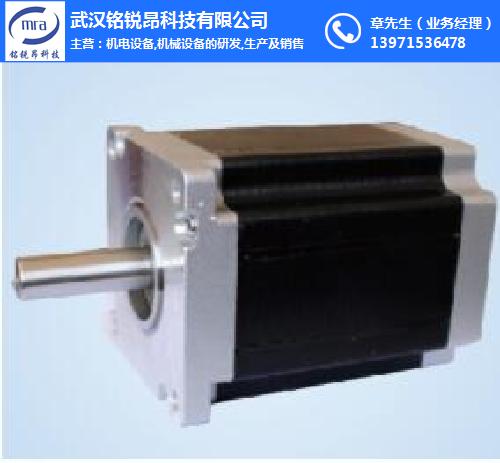
步進電機和驅動器的選擇方法:判斷需多大力矩:靜扭矩是選擇步步進電機(圖3)進電機的主要參數之一。負載大時,需采用大力矩電機。力矩指標大時,電機外形也大。判斷電機運轉速度:轉速要求高時,應選相電流較大、電感較小的電機,以增加功率輸入。且在選擇驅動器時采用較高供電電壓。選擇電機的安裝規格:如57、86、110等,主要與力矩要求有關。確定定位精度和振動方面的要求情況:判斷是否需細分,需多少細分。根據電機的電流、細分和供電電壓選擇驅動器。
自適應控制自適應控制是在 20 世紀 50 年代發展起來的自動控制領域的一個分支 。它是隨著控制對象的復雜化 ,當動態特性不可知或發生不可預測的變化時 ,為得到高性能的控制器而產生的 。其主要優點是容易實現和自適應速度快 ,能有效地克服電機模型參數的緩慢變化所引起的影響 ,是輸出信號跟蹤參考信號 。文獻研究者根據步進電機的線性或近似線性模型推導出了全局穩定的自適應控制算法 , 這些控制算法都嚴重依賴于電機模型參數 。
注意
1、步進電機應用于低速場合---每分鐘轉速不超過1000轉,(0.9度時6666PPS),最1好在1000-3000PPS(0.9度)間使用,可通過減速裝置使其在此間工作,此時電機工作效率高,噪音低;2、步進電機最1好不使用整步狀態,整步狀態時振動大;3、由于歷史原因,只有標稱為12V電壓的電機使用12V外,其他電機的電壓值不是驅動電壓伏值 ,可根據驅動器選擇驅動電壓(建議:57BYG采用直流24V-36V,86BYG采用直流50V,110BYG采用高于直流80V),當然12伏的電壓除12V恒壓驅動外也可以采用其他驅動電源, 不過要考慮溫升;4、轉動慣量大的負載應選擇大機座號電機;




 廣告
廣告