型號:SOLD-CBXS-CNDX-O
第1章 系統簡介
1.1 現場概述
船舶下水是造船過程中一個重要階段的轉換,亦是一個標志性階段。它的前一階段在陸地上的船臺或水中船塢施工,當船舶建造工程大部分完工之后,將船舶從建造區移至水域區即為下水。下水意味著船舶建造已完成了關鍵性工作,下水前的船舶舾裝完工量往往可達70%~80%,甚至超過95%。按船舶下水原理可分為:重力式下水、漂浮式下水、機械化下水和氣囊式下水四大類。
A. 重力式下水是船舶在本身重力的作用下,從船臺上沿滑道逐漸向水中移動使船浮起的方法。重力式下水又分縱向涂油滑道下水、縱向鋼珠滑道下水和橫向涂油滑道下水三種。
B. 漂浮式下水用水泵或自流方式把水注入造船的水池里依靠船舶自身的浮力將船浮起的下水方式。一般為造船塢下水。
C. 機械化下水利用卷揚機或其他裝備將船舶從建造平臺送入水中。
D. 氣囊式下水利用高壓充氣橡膠氣囊承擔船舶自重,通過氣囊的滾動變形及船舶自重結合平臺坡度使船舶順利下水。
船舶的上墩、下水設備與設施反映了一個船廠的生產能力,也決定了船廠所能建造船舶的等級大小、重量、長度及船型。因此上墩和下水設備、設施被稱之為船廠的咽喉。隨著船舶噸位的提高,不是簡單地增加卷揚機、斜架車數量和提高能力的問題,而是卷揚機群的同步協調問題。梳式滑道電力拖動卷揚機群的同步與否直接影響到相關工業生產的安全,并且隨著卷揚機拖力的提高和卷揚機數量的增加,對卷揚機同步性的要求越來越重要。由于多臺卷揚機同時作業存在不同步問題而使船舶偏斜,影響船舶上下坡安全。
為確保船廠承接的大型船舶安全順利下水,改變傳統的梳式滑道只適用于中小型船舶上下坡的觀念,充分發揮梳式滑道船廠的船臺可靈活布置的優點,實現同時修造多條船舶,縮短修、造船周期,我們采用國際先進的船舶下水斜架車同步平衡控制系統,該系統關鍵是選用合適的位置檢測傳感器-刻度標尺jq定位系統。
1.2 目前采用的定位方式
目前斜架車位置檢測采用的大多是光電編碼器裝置(光碼盤)、激光位移傳感器、GNSS位置檢測,具體表現如下:
1) 光電編碼器裝置,整套裝置安裝在驅動電機前部的一個金屬殼體內,由盤狀齒輪與卷揚機齒條嚙合,通過驅動軸驅動編碼器。盤狀齒輪的圓周與卷揚機驅動小齒輪的圓周相同。編碼器由傳動齒輪自下而上通過減速機、聯軸節驅動,實現卷揚機的位置檢測,由于鋼絲繩存在擾度,故長距離檢測會存在比較大誤差,相對定位的機械接觸工作方式;
2) 激光位移傳感器在不潔凈環境會失去作用,軌道沉降導致車輛走行抖動會使反光板靶位不準,亦會導致位置檢測不準,致命的是水下部分檢測不到;
3) GNSS位置檢測是利用GPS,北斗wxdw,是相對定位,受天氣環境影響大,致命的是水下部分檢測不到。
這三種傳感器在檢測位置時多數為機械式、靈敏度低、壽命短、故障率高、可靠性低,操作繁鎖,而且存在溜放環節(即失控區),致使半自動操作難以可靠穩定運行。由于斜架車是較大的設備,其慣性較大,在啟動和停止時也是硬性的,所以在工作過程中會產生很大的撞擊和震動,噪音污染嚴重,嚴重影響其安全性和有關零部件的壽命,易于損壞設備,由此設備jq位置控制顯得尤為重要。
1.3 本系統采用的定位技術
本系統采用在梳式滑道上加裝刻度標尺jq定位系統的檢測技術,實現斜架車的位置jq檢測。刻度標尺檢測到的斜架車位置精度高,信號穩定可靠。在車輛狀態良好的情況下,采用下船系統全聯機自動運行方式,即只要滿足啟始條件,按下自動啟動按鈕,系統將全部自動運行,操作人員只起監控作用,當發生機械故障或意外情況時,按自動停止或急停按鈕,解除自動程控操作。
1.4 本系統采用的同步控制方式
目前大多數船廠采用人工觀測,每臺卷揚機旁設一操作工,通過對講機、吹口哨、旗幟等方式來溝通執行操作,下放斜架車。這種傳統原始的方法勢必造成監測的精度不夠和調控措施的滯后,且受人為因素影響較大,對于大型船舶下水如果每個斜架車下移速度不同步,又無法及時調整,很容易導致船舶下水過程中斜架車的脫軌,影響船舶下水的質量。因此,為了保證大型船舶下水的安全可靠,必須對系統進行即時監測和自動控制,確保船舶下水時移動的同步性,{zd0}限度的保證船舶的下水安全。本系統采用變頻器和PLC程控系統。根據船體形狀,每次升船(或放船)作業可指定任意臺斜架車聯合運行;在升船(或放船)運行過程中,要求船體的水平偏移度不超出允許范圍;各種設備按要求進行同步動作,可實現遠程操作、全程工作記錄、監控、過載保護、自鎖、互鎖、互控啟動,時間延遲及動作程序,并可進行遠程、手動和自動功能切換,具有防止誤操作功能。整個系統具有自動化程度高,同步糾偏控制,操作簡單、可靠,節省勞動力特點。
第2章 刻度標尺jq定位系統
2.1 刻度標尺系統簡單說明
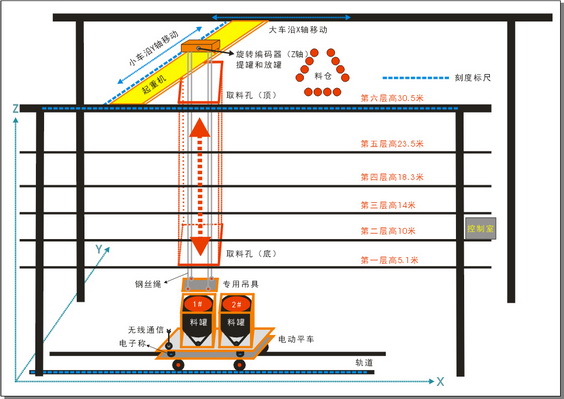
刻度標尺jq定位系統包括一臺地面電氣柜(含刻度分析儀等)、一臺車載電氣柜(含刻度生成儀等)、刻度標尺以及游尺指針等。其中刻度標尺是由扁平狀的PVC合成材質外殼材料和內部按照格雷碼規律編制的芯線構成,類似一把有刻度的標尺,一般安裝在沿斜架車運行軌道單側邊,或者沿運行軌跡鋪設在地面上,亦或安裝在軌道旁的柵欄立柱上均可,需要檢測多長的位移就鋪設多長的刻度標尺;游尺指針安裝在斜架車上,用于識別本斜架車所在的位置。游尺指針相對刻度標尺平行非接觸移動,游尺指針指向的刻度即是當前位置值,可以在車上或地上得到位移量,無需初始參考點,定位精度5毫米,分辨率2毫米;可以斷續或連續檢測,尤其適用于軌道不平整的大車或環形運動機械位移檢測。防水、防油、防塵、耐酸堿,適用于冶金、礦山、水利、港口碼頭堆場、倉儲、化工等條件比較惡劣的環境。
2.2 刻度標尺系統原理
刻度標尺jq定位系統采用電磁感應原理來檢測移動設備的位移量,當游尺指針線圈中通入交變電流時,在游尺指針附近會產生交變磁場。刻度標尺近似處在一個交變的、均勻分布的磁場中,每對刻度標尺芯線會產生感應電動勢。刻度生成儀信號通過電磁耦合方式傳送到刻度標尺的感應環線上。刻度分析儀對接收到的信號進行相位比較。交叉線的信號相位與平行線的信號相位相同,地址為“0”;交叉線的信號相位與平行線的信號相位相反,地址為“1”,這樣感應的地址信息是格雷碼排列,由此確定游尺指針在刻度標尺長度方向上的位置。
2.3 刻度標尺技術指標
* 斜架車地址測量精度:≤5mm,分辨率:2毫米,測量范圍:任意定制;
* 工作環境溫度:系統工作溫度:-20℃—+70℃,
刻度標尺工作溫度:不加防護套:-40℃—+85℃,
加防火套:-40℃—600℃,高溫時耐熱時間約80秒;
* 非接觸間隙:150mm±50mm(根據需要可達500毫米),左右偏擺容差:±50mm;
* 重量:刻度標尺重量:1.5Kg/m,外形尺寸:100mm×10mm×長度;
游尺指針重量:≤2.5Kg,外形尺寸:400mm×400mm×30mm(特殊可定制);
* 通信誤碼率:<10-7;
* 刷新速度:20HZ;
* 適應速度:≤350M/min;
* 標準信號輸出:RS232/RS485,可擴展其它信號;
* 信號傳輸距離:≤1200米(485信號輸出);
* 刻度標尺和游尺指針防護等級:普通IP67,{zg}IP69(水下工作);
* 輸入電源:220VAC±10%;
* 耗電:地面電氣柜<100w車載電氣柜<100w。
2.4 刻度標尺功能特點
系統中的刻度生成儀(兼函數信號發生)按一定的周期發出地址載波信號,經游尺指針發射至刻度標尺,地面站的刻度分析儀接收到信號后,解碼還原出斜架車所處刻度標尺處的{jd1}地址,經控制器處理后由RS232或者RS485輸出。
* 無磨損的非接觸式位置檢測,使用壽命長;
* 可以斷續或連續檢測,測距長達2公里,位移檢測長度可以根據需要定制;
* 耐污染能力超強,可用在水下、防蒸汽、耐酸堿;
* 安裝簡單更換方便(無需改變現場環境),免維護;
* 高穩定性、高可靠性、多種信號輸出方式選擇;
* 具有反向極性保護功能、防雷擊、防射頻干擾、防靜電;
* 無需參考點的位移量{jd1}型輸出,不怕掉電;
* 位置的取樣時間和測量長度沒有關系;
* 可以用在環形運動機械位置檢測。
* 刻度標尺可以埋在水泥地面內,方便安裝和防護,不影響作業環境。
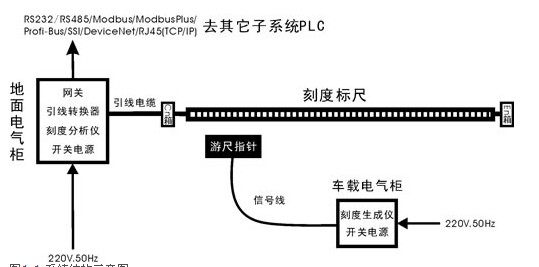
2.5 刻度標尺單套設備結構圖(一維檢測)
1) 車載子系統:由游尺指針、車載電氣柜(內含刻度生成儀、開關電源等)。
2) 地面子系統:由地面電氣柜組成(內含刻度分析儀、開關電源、網關、標尺引線轉換器等)。
3) 刻度標尺子系統:由專用刻度標尺、CN箱、EN箱、普通電纜以及各種用于刻度標尺安裝、固定、防護機構組成。
圖示2:一維檢測系統結構示意圖
第3章 電控同步平衡系統
卷揚機電機可采用三相異步電動機。卷揚機控制系統采用交流全變頻調速,系統能在允許{zd0}牽引力范圍內,對斜架車進行自動或手動的同步調整,以確保斜架車能平穩的上、下平行移動。12臺卷揚機可以聯動或單臺工作,也可任意選定其中的幾臺電機進行聯動工作。
3.1 上拉下放控制
(1) 卷揚機構閉環控制的速度反饋采用刻度標尺jq定位系統。PLC與變頻器通過總線實現通訊控制,PLC實時讀取變頻器的數據,并通過輸入給PLC的主令控制器信號控制變頻器的頻率及電動機的轉速。設備啟動時,保證必須的起動轉矩又不會對電網進行大的沖擊,起動電流應控制在可以接受的數值內。
(2) 變頻器前設置線路電抗器。
(3) 系統支持電氣和機械制動,在停機時采用電氣制動方式,提供可控的和平滑的制動性能,在電機降到零速之后,立即施加機械制動,在任何失電情況下,均應立即施加機械制動。卷揚機構機械制動采用電液推動制動器,變頻器具有完整的抱閘邏輯功能,合理控制剎車的開閉時間,減少抱閘開閉時的振動及磨損,使起停更平穩。
(4) 斜架車下降過程中,負載的位能將通過制動電阻發熱的形式消耗掉,因此每套變頻柜都配有適當功率的制動電阻。
(5) 在每臺卷揚機的適當位置安裝一個旋轉式限位開關。當斜架車上升到接近上限位置時,該限位開關發出指令,降低斜架車的運行速度(無論指令控制器在何檔位),當斜架車到達上限位置時,系統發出停止斜架車運行的指令,斜架車下降時同樣設置降速和停止二點位置開關。在各條軌道的最上面另安裝一限位開關,作為{zh1}的終端保護。同時卷揚機應設置有過載保護裝置,當監測到鋼絲繩拉力超過額定負載時應自動停車。
(6) 卷揚機構的電氣保護有短路及過電流保護、過載保護、失壓及零位保護,當變頻器出現故障信號時,必須通過操作臺的復位按鈕進行復位。
3.2 同步位置控制
(1) 在多臺卷揚機同時作業情況下,由于多種原因可能存在卷揚機不同步而導致下水船舶發生偏斜,將影響船舶下水過程的安全。控制系統具有監視各斜架車的位置的設備,結合變頻調速和PLC控制。實現船舶在下水過程中船舶舯軸線與滑道零軸線之間的連續{jd1}位置偏斜檢測和控制。多臺電機聯動時主給定為速度給定,即速度給定力矩限制的方式。起升信號和速度由同一開關給定,各個提升機構同時提升。PLC通過總線實時監視各個變頻器的電流、電壓、力矩等數據。
(2) 對于船舶上、下水時,所用斜架車同步控制系統最終要求達到其中任意兩臺斜架車所帶位置傳感系統在斜坡道上的行程位置范圍內全程實現同步控制后的相對位移差{zd0}不超過350mm。任意相鄰兩臺斜架車相對位移差{zd0}不超過140mm。當相對位移小于100mm同步控制系統不發出控制指令,當相對位移大于140mm小于250mm時,同步控制系統發送指令到相應變頻器,調整各電機的速度,實現自動同步、相差值大于250mm時同步控制程序發送指令到相應變頻器,調整各電機速度同時整個系統的速度下降到比較低的速度,以防止相差值進一步擴大,并發出預報警信號。當系統調整到相對位移小于100mm時,系統停止調整。當相差值大于500mm時,系統自動停車并報警。運行過程中同時對力矩進行監視,當某臺電機的力矩大于人為設定的限制力矩時,控制系統對相應的電機發出指令調整其力矩或速度。當電機力矩大于危險力矩或力矩過小,控制系統報警并停機,此時需操作人員根據觸摸屏上的提示進行手動調整。故障排除后系統可自動復位。以上設定的斜架車不同步參數數值和力矩參數數值均可按照今后調試和試用情況任意調整。
3.3 工控機、PLC控制及故障監控系統
(1) 控制系統采用手動、聯動、自動等控制方式,自動控制方式采用工控機+觸摸屏二級控制操作系統,并預留遠程操作接口。
(2) 由工控機、PLC、變頻器、同步控制設備、負荷保護裝置、各主令控制設備等組成PLC控制的全變頻調速系統。主令控制器功能選擇開關,變頻器內各電器參數、各保護系統的有關數據、各限位開關等信號直送PLC,PLC根據預編程序,將各種指令送各執行機構及調速器,決定各運行機構的速度大小,并對其進行控制調節。各信息的傳遞都由現場總線完成。
(3) 故障監控系統由PLC和操作室內的觸摸屏組成友好的人機界面,通過現場總線直接從PLC中讀取數據,實現信息共享,用圖形和文字實時顯示故障的位置及簡單的處理方法,監控各主要電器元件運行或停止的狀態,變頻器運行參數、各機構位置及流程數據等。可實時監控斜架車整機運行情況及各斜架車的狀態,自動生成運行參數的報表并具有故障記錄、歷史數據查詢等功能。
3.4 手動操作
* 手動操作通過主令控制器進行。對位、歸位和自動運行按鈕無效;?
* 手動操作分兩種狀態,PLC 參與或不參與。兩種狀態根據 PLC 是否正常運行自動切換。前者常用于自動運行時對某個斜架車進行人工調整, 而后者常用于 PLC故障時的臨時運行。當 PLC故障(或被切除)時,安裝在第 12臺變頻器上的內部控制卡將自動接管CanOpen網,代替 PLC進行全部變頻器的運行監測,確保作業安全。PLC和內部控制卡的切換只能在斜架車未運行時進行;
* 手動操作時,斜架車的運行速度由主令控制器給出。空載時,可以進入弱磁速度(空載高速運行),帶載后,PLC或內部擴展卡將禁止所有斜架車的弱磁速度運行(通過邏輯量輸出端子和繼電器屏蔽弱磁給定信號)如果變頻器通訊故障被旁路旋鈕屏蔽,PLC或內部擴展卡將不參與運行監測。這時手動操作仍可進行,但弱磁速度被徹底禁止(無論斜架車是否帶載),下面介紹的起動速度限幅、力矩監控、極限位置整體減速和停車等功能均無法實現,操作員必須特別關注系統運行的安全性;
* 無論 PLC是否參與,變頻器將始終投入;
* 如果PLC參與, 斜架車位置檢測系統將用于屏幕上的斜架車位置顯示; 如果PLC不參與,位置檢測系統將不起作用;
* 參與作業的斜架車選擇:通過“手動斜架車選擇開關”選擇需要參與作業的斜架車,被選中的斜架車對應指示燈亮。典型地,可以選中全部 12臺斜架車提放大型船只,也可以只選中 1臺斜架車用于運送工具或材料;
* 斜架車初始位置的對齊方式:?
* 下放作業: 可以通過主令控制器給出全體上升命令, 選中的斜架車以指定速度上升,分別在上升減速位置自動減速,在停止位置(工藝位置)自動停止;
* 提升作業:下放斜架車到達大致位置后,對每臺斜架車單獨調整,使其到達工藝要求的實際位置;
* 起動速度限幅:斜架車的運行速度wq由主令控制器的檔位決定,但帶載時,斜架車的運行速度在運行初期將被短時間限幅, 斜架車的速度和位置將在此時間段里得到初步平衡。同時,帶載時弱磁速度被禁止;
* 極限位置整體減速和停車:斜架車的減速和停止由操作員控制。但任一臺斜架車到達旋轉限位開關的上下減速位置時都將引起全部斜架車減速并觸發報警信號; 任一臺斜架車到達旋轉限位開關的上下停止位置時都將引起全部斜架車緊急停止并觸發報警信號;
* 力矩監測:手動操作時,各斜架車的力矩仍然受到 PLC或內部控制卡的監測。力矩大于警戒值或小于極限值將產生報警信號,但系統不會自行停止斜架車的運行;
* 速度監測:手動運行時,全部斜架車的給定速度是相同的,一旦出現不同將視為故障。手動操作時如果需要糾偏,只能停止全部斜架車運行后再對某些斜架車進行單動調整;
3.5 自動運行
* 自動運行通過對位、歸位和自動運行按鈕操作,主令控制器無效;
* 參與作業的斜架車選擇:通過觸摸屏選擇需要參與作業的斜架車,被選中的斜架車對應指示燈亮。典型地,可以選中全部12臺斜架車提放大型船只,也可以只選中1臺斜架車用于運送工具或材料。手動斜架車選擇開關無效;?
* 系統存在通訊故障時不允許進行自動運行,通訊故障旁路旋鈕無效;
* 斜架車的對位:按下對位按鈕,選中的斜架車以弱磁速度上升,分別在上升減速位置自動減速,在停止位置(工藝位置)自動停止。PLC記錄這時的斜架車實際位置,以此作為各斜架車的原點。要求每次作業前進行一次對位,以xc原點位置偏差。對位操作只允許在空載時進行,如果帶載,系統將報故障;
* 斜架車的歸位: 斜架車的起始位置在觸摸顯示屏設置, 系統會自動計算相應的減速位置。按下歸位按鈕可以使全部斜架車以弱磁速度進入起始位置。 歸位操作只允許在空載時進行,如果帶載,系統將報故障;
* 斜架車的運行:按下自動運行按鈕后,系統進入自動運行狀態;
* 運行終點位置在觸摸顯示屏設置,系統自動計算相應的減速位置;
* 自動運行指示燈亮,各斜架車的起始給定速度為調整速度,各斜架車的實際給定速度和位置根據現場情況通過斜架車的滾輪和滑差特性(力矩均衡功能)進行前期調整;
* 初步調整后,斜架車的基準給定速度上升到額定運行速度,各斜架車的實際給定速度為基準給定速度加減前期調整時獲得的調整值;
* 在升速過程中,系統根據實際負載和{zg}帶載速度限幅計算出允許的{zg}運行速度;
* 在額定運行速度穩定運行后,系統繼續升速到{zg}運行速度運行;
* 在運行全過程,系統根據各斜架車的位置偏差不斷進行糾偏處理;
* 任一臺斜架車到達減速位置后,全部斜架車的基準速度給定減速至就位速度;
* 任一臺斜架車到達終點位置后,全部斜架車停止運行,一次作業完成。如有必要,可對部分斜架車進行手動位置調節;
* 在運行過程中,如果按下暫停按鈕,斜架車將通過減速斜坡停止運行,自動運行指示燈閃亮。再次按下自動運行按鈕后可恢復自動運行;
* 在運行暫停時切換到 PLC參與監測的手動操作, 返回自動運行后可通過自動運行按鈕恢復上次運行。按下歸位、對位按鈕,或再次按下暫停按鈕時,本次自動運行過程結束,自動運行指示燈熄滅。
第4章 系統實現功能特點
* 斜架車非接觸{jd1}實時位置檢測;
* 同步位置糾偏控制;
* 可指定任意臺斜架車聯合運行;
* 可實現遠程操作、全程工作記錄、監控、過載保護、自鎖、互鎖、互控啟動;
* 可進行遠程、手動和自動功能切換,具有防止誤操作功能;
* 可大大提高船舶上下水的管理水平,在控制臺上就可實時監控船體上下水的現場情況;
* 可自動控制卷揚機負荷的運行速度,能及時調整卷揚機鋼絲繩的長度;
* 可以調整整個船體的平衡水平,確保各類船體安全、可靠、平穩地上下水;
* 可在水下長期穩定運行;
* 操作簡單、可靠,節省勞動力特點。
第5章 系統應用領域
船舶下水斜架車同步平衡控制系統主要用于梳式滑道機械化船舶下水控制,修船廠上排裝置。
宜昌索爾德自動化科技有限公司
Yichang sold Automation Technology Co.Ltd.
地址:湖北宜昌市高新技術開發區城東大道10-6-108號,郵政編碼:443000
24小時熱線:18671740040 辦公電話:0717-6566110
郵箱:18671740040@ QQ:984977709 群:292452310
網址:http://




 廣告
廣告