選擇方法
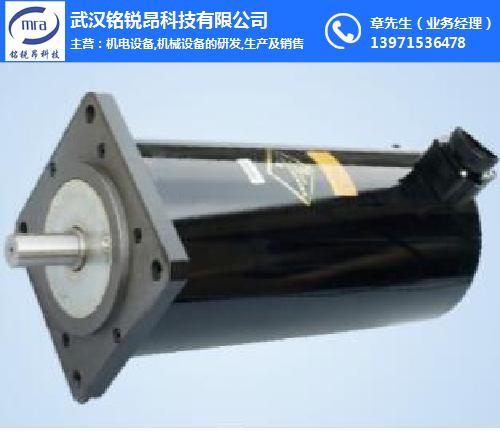
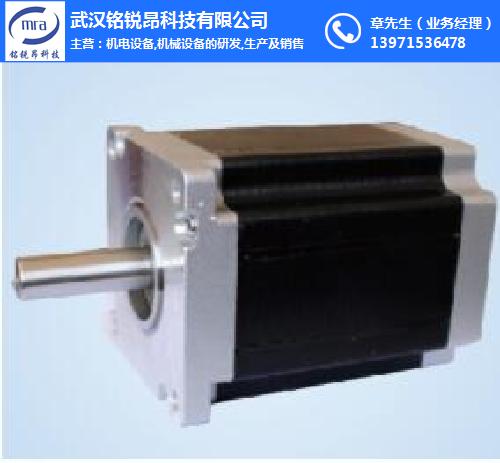
步進電機和驅(qū)動器的選擇方法:判斷需多大力矩:靜扭矩是選擇步步進電機(圖3)進電機的主要參數(shù)之一。負載大時,需采用大力矩電機。力矩指標大時,電機外形也大。判斷電機運轉(zhuǎn)速度:轉(zhuǎn)速要求高時,應選相電流較大、電感較小的電機,以增加功率輸入。且在選擇驅(qū)動器時采用較高供電電壓。選擇電機的安裝規(guī)格:如57、86、110等,主要與力矩要求有關(guān)。確定定位精度和振動方面的要求情況:判斷是否需細分,需多少細分。根據(jù)電機的電流、細分和供電電壓選擇驅(qū)動器。
缺陷1、如果控制不當容易產(chǎn)生共振;2、難以運轉(zhuǎn)到較高的轉(zhuǎn)速;3、難以獲得較大的轉(zhuǎn)矩;4、在體積重量方面沒有優(yōu)勢,能源利用率低;5、超過負載時會破壞同步,高速工作時會發(fā)出振動和噪聲。驅(qū)動方法編輯步進電機不能直接接到工頻交流或直流電源上工作,而必須使用專用的步進電動機驅(qū)動器,它由脈沖發(fā)生控制單元、功率驅(qū)動單元、保護單元等組成。驅(qū)動單元與步進電動機直接耦合,也可理解成步進電動機微機控制器的功率接口。

別的新式60步進電機優(yōu)化計劃算法概述在60步進電機優(yōu)化計劃進程中,計劃變量初始值的可行性是優(yōu)化計劃勝敗的要害。以60步進電機計劃專家供給的專業(yè)常識和經(jīng)歷為依據(jù),將專家體系與傳統(tǒng)優(yōu)化計劃相聯(lián)系,為處理優(yōu)化算法初始值可行性疑問供給了一條有利路徑,然后保證優(yōu)化計劃能夠順利進行。
在60步進電機計劃中,不僅要用到邏輯推理,并且要用到類推、聯(lián)想、經(jīng)歷等辦法。神經(jīng)網(wǎng)絡具有散布并行、自組織、自聯(lián)想、容錯性等特征,與專家體系具有較強的互補性,提出了依據(jù)神經(jīng)網(wǎng)絡的類推法斷定60步進電機首要尺度和依據(jù)神經(jīng)網(wǎng)絡的60步進電機計劃經(jīng)歷常識表示辦法,并在一種Y系列小型三相異步電動機的計劃中獲得成功。別的,文60步進電機的優(yōu)化計劃,對方針函數(shù)進行含糊化處理,實例成果的滿意度比原計劃有較大進步,闡明含糊優(yōu)化是一種行之有用的60步進電機優(yōu)化辦法。
等人提出的一種合適于組合優(yōu)化疑問的優(yōu)化算法,具有構(gòu)造簡練,對初始點依賴性不強等特色,并能求出大局最長處或近似大局最長處。




 廣告
廣告
、安防步進電機、武漢步進電機")