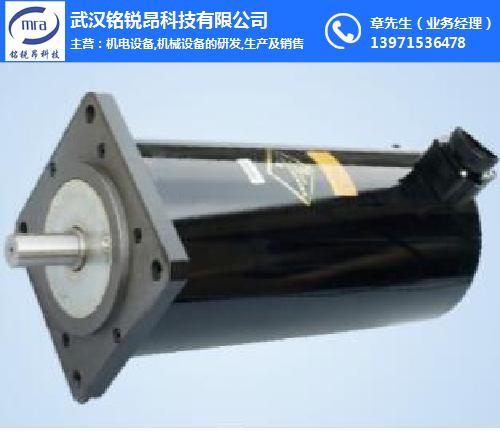
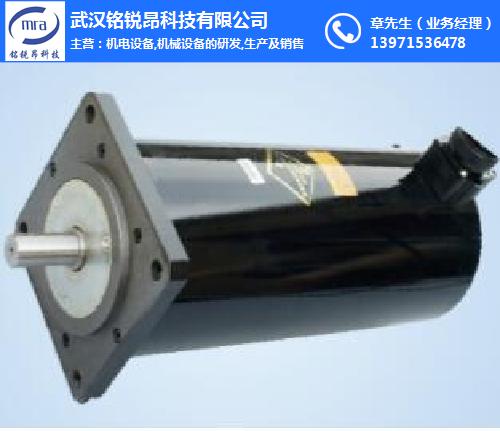
步進(jìn)電機(jī)的加減速過(guò)程及控制技術(shù)
步進(jìn)電機(jī)加減速過(guò)程控制技術(shù)正因?yàn)椴竭M(jìn)電機(jī)的廣泛應(yīng)用,對(duì)步進(jìn)電機(jī)的控制的研究也越來(lái)越多,在啟動(dòng)或加速時(shí)如果步進(jìn)脈沖變化太快,轉(zhuǎn)子由于慣性而跟隨不上電信號(hào)的變化,產(chǎn)生堵轉(zhuǎn)或失步在停止或減速時(shí)由于同樣原因則可能產(chǎn)生超步。為防止堵轉(zhuǎn)、失步和超步,提高工作頻率,要對(duì)步進(jìn)電機(jī)進(jìn)行升降速控制
主要分類(lèi):
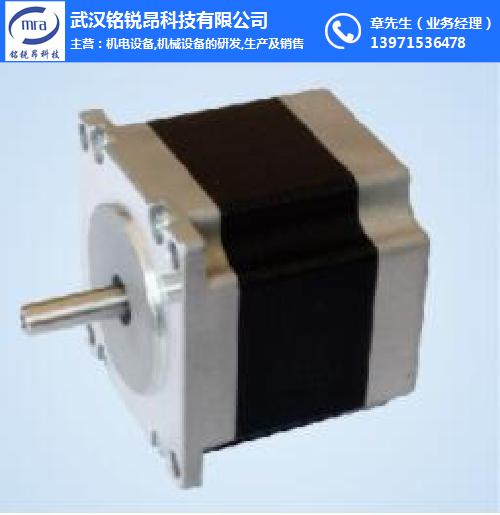
反應(yīng)式:定子上有繞組、轉(zhuǎn)子由軟磁材料組成。結(jié)構(gòu)簡(jiǎn)單、成本低、步距角小,可達(dá)1.2°、但動(dòng)態(tài)性能差、效率低、發(fā)熱大,可靠性難保證。永磁式:永磁式步進(jìn)電機(jī)的轉(zhuǎn)子用永磁材料制成,轉(zhuǎn)子的極數(shù)與定子的極數(shù)相同。其特點(diǎn)是動(dòng)態(tài)性能好、輸出力矩大,但這種電機(jī)精度差,步矩角大(一般為7.5°或15°)。混合式:混合式步進(jìn)電機(jī)綜合了反應(yīng)式和永磁式的優(yōu)點(diǎn),其定子上有多相繞組、轉(zhuǎn)子上采用永磁材料,轉(zhuǎn)子和定子上均有多個(gè)小齒以提高步矩精度。其特點(diǎn)是輸出力矩大、動(dòng)態(tài)性能好,步距角小,但結(jié)構(gòu)復(fù)雜、成本相對(duì)較高。
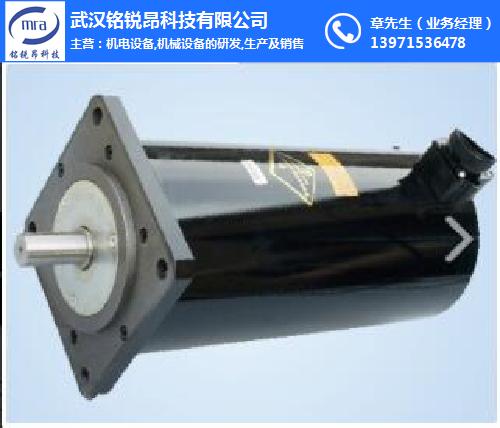
作為一種直接模擬人類(lèi)思維結(jié)果的控制方式 , 模糊控制已廣泛應(yīng)用于工業(yè)控制領(lǐng)域 。與常規(guī)控制相比 ,模糊控制無(wú)須精1確的數(shù)學(xué)模型 , 具有較強(qiáng)的魯棒性 、自適應(yīng)性 , 因此適用于非線性 、時(shí)變 、時(shí)滯系統(tǒng)的控制 。文獻(xiàn)[ 16] 給出了模糊控制在二相混合式步進(jìn)電機(jī)速度控制中應(yīng)用實(shí)例 。系統(tǒng)為超前角控制 ,設(shè)計(jì)無(wú)需數(shù)學(xué)模型 ,速度響應(yīng)時(shí)間短 。 [2]



二維碼")
版二維碼")

、激光打標(biāo)機(jī)步進(jìn)電機(jī)、武漢步進(jìn)電機(jī)")