文獻根據步進電機的數學模型 ,設計了步進電機的 PID 控制系統 ,采用 PID 控制算法得到控制量 ,從而控制電機向指1定位置運動 。{zh1} ,通過仿真驗證了該控制具有較好的動態響應特性 。采用 PID 控制器具有結構簡單 、魯棒性強 、可靠性高等優點 ,但是它無法有效應對系統中的不確定信息 。 [2] 目前 , PID 控制更多的是與其他控制策略相結合 , 形成帶有智能的新型復合控制 。這種智能復合型控制具有自學習 、自適應 、自組織的能力 ,能夠自動辨識被控過程參數 , 自動整定控制參數 , 適應被控過程參數的變化 ,同時又具有常規 PID 控制器的特點。 [2]

注意
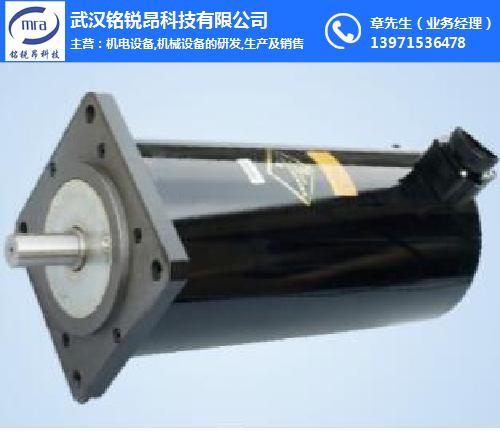
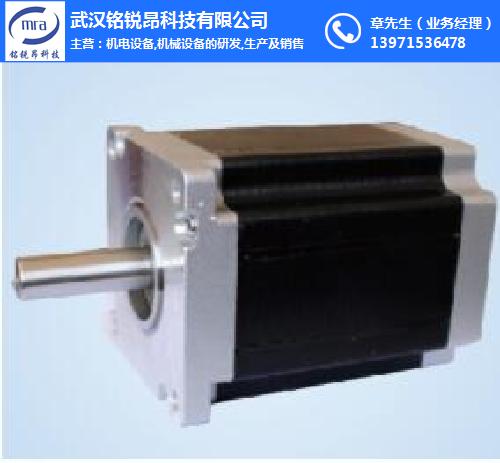
1、步進電機應用于低速場合---每分鐘轉速不超過1000轉,(0.9度時6666PPS),最1好在1000-3000PPS(0.9度)間使用,可通過減速裝置使其在此間工作,此時電機工作效率高,噪音低;2、步進電機最1好不使用整步狀態,整步狀態時振動大;3、由于歷史原因,只有標稱為12V電壓的電機使用12V外,其他電機的電壓值不是驅動電壓伏值 ,可根據驅動器選擇驅動電壓(建議:57BYG采用直流24V-36V,86BYG采用直流50V,110BYG采用高于直流80V),當然12伏的電壓除12V恒壓驅動外也可以采用其他驅動電源, 不過要考慮溫升;4、轉動慣量大的負載應選擇大機座號電機;
目前在步進電機的細分驅動技術上,采用斬波恒流驅動,儀脈沖寬度調制驅動、電流矢量恒幅均勻旋轉驅動控制止,,幾大大提高步進電機運行運轉精度,使步進電機在中、小功率應用領域向高速且精密化的方向發展。 [1] 最初,對步進電機相電流的控制是由硬件來實現的,通常采用兩種方法,采用多路功率開關電流供電,在繞組上進行電流疊加,這種方法使功率管損耗少,但由于路數多,所以器件多,體積大。先對脈沖信號疊加,再經功率管線性放大,獲得階梯形電流,優點是所用器件少,但功率管功耗大,系統功率低,如果管子工作在非線性區會引起失真、由于本身不可克服的缺點,因此目前已很少采用這兩類方法。




 廣告
廣告
、武漢步進電機")